歳差運動による春分点の移動
地球の地軸は23.4度傾いているということはよく知られているが、その傾きは歳差運動や章動により日々変化している。そして、地軸の向きが変化すると春分点が移動する。この記事では、地軸の向きと春分点の方向の関係を見ていく。
春分点とは
まずは、春分点という言葉の定義を確認する。wikipediaによると、
春分点(しゅんぶんてん、英: vernal equinox)とは、黄道と天の赤道との2つの交点(分点)のうち、黄道が南から北へ交わる方の点(昇交点)のこと。
とのこと。しかし、黄道や赤道は地球から見た宇宙なので、天動説風の定義である。そこで、これを地動説風に言い換えると(正確ではないが)、
春分の日に地球から見て太陽がある方向(にある天球上の点)。
となる。
春分の日の特徴
これ以降は、春分点の位置を二つ目の定義方法に従って考えていく。太陽が動かないものとすると、春分点の位置は、春分の日の地球の位置で決まる。春分の日の特徴を考えて、その特徴を満たす位置を求めるというやり方で、春分の日の地球の位置を割り出す。
春分の日の最も顕著な特徴は、夜と昼の時間が同じことだ。これは、
地球に対する太陽の位置ベクトルを法線ベクトルとする、地球中心を通る平面に、地軸が含まれる。
と言い換えられる。と言ってもわかりにくいから、図で見てみる。

この図の真ん中の透明球が地球を表している。太陽(sun)からの光が届く範囲は、図の中の平面の上側であるのは明らかだろう。この平面が、"地球に対する太陽の位置ベクトルを法線ベクトルとする、地球中心を通る平面"だ。見てわかる通り、この平面に地軸(axis)が含まれる時、あらゆる地点において昼夜の長さが同じになる。図を見れば明らかなように、この平面内で地軸がどう動いても、この時点が春分の日であることに変わりはない。そして、このことと、このようにして得られる全ての平面にz軸に平行な直線が含まれることから、地軸のz軸方向の傾きは、無視して良いことがわかる。変な座標軸があるけど、ここでは無視して、後の説明に使うものなので。。
歳差運動による春分の日の変化
次に、地軸が変化することで春分の日がどう影響を受けるか見ていく。

図中の白丸は地球、黒丸は太陽、楕円は地球軌道を表している。そして、外側の円(以降、外円という)は、太陽を中心として地球軌道に接するような円である。図には二つ地球が描いてあるが、上側の白丸が春分の日、下側が秋分の日を表している(後で説明)。太陽から春分の日の地球の位置へ伸ばした半直線が外円と交わる地点に、地球の太陽に対する位置ベクトルを法線ベクトルとする平面をとる(図中の垂直平面)。平面上には、交点(丸)、外円の接線(tangent)(実直線)、およびz軸に平行で交点を通る直線(点線)を書き込む。その平面を倒して水平にすると、先ほどの図が得られたとする。つまり、地軸の方向が図のようであったとする。(再掲する)

ここから歳差運動で地軸がずれ、以下の図のようになったとする。

このとき、この時点は春分の日ではなくなるのだが、では、春分の日はどこに変わったのだろうか。それをこれから見ていく。先ほどの言ったように、地軸のz軸成分は無視できるので、以降は地軸をxy平面に投影したもの(projection)を考えていく。

xy平面は、地球の軌道を含む平面(黄道面)なので、地球の軌道上に地軸を書き込むことができる。

春分の日の特徴は、
地球に対する太陽の位置ベクトルを法線ベクトルとする、地球中心を通る平面に、地軸が含まれる。
だったが、これは、
地軸の投影直線と太陽と地球を結ぶ直線が垂直である。
と言い換えることができる。また、円の性質として、接線と、中心と接点を結ぶ直線は直交するので、地軸の投影直線を平行移動(translation)させた直線と外円が接する場所(point of tangency)と、太陽を結ぶ直線と、地球軌道の交点に地球があるときに、春分の日になることがわかる。もう、言葉で説明しても訳がわからないと思うので、上の図を見て頑張って考えて。
このようにして、地軸の移動と春分の日の移動が関係しているのだ。
春分の日と秋分の日
上の図を見て、春分の日が二つあるじゃないかと思ったと思う。もちろんそんなことはなく、実は、片方は秋分の日を表しているのだ。先ほど、春分の日の特徴として、昼の長さと夜の長さが同じことを使ったが、これは当然秋分の日にも当てはまる。春分点のwikipediaの定義は、
春分点(しゅんぶんてん、英: vernal equinox)とは、黄道と天の赤道との2つの交点(分点)のうち、黄道が南から北へ交わる方の点(昇交点)のこと。
となっているが、僕らは"南から北へ"という条件を使っていないのだ。これが"北から南へ"となるのが秋分の日という訳だ。
この定義を使うために、まずは、この記事での南北の定義を与える。
右手系における、地球の自転の回転ベクトルの方向。南はその反対方向。
面倒な定義をしたが、ようするに、地球の自転が反時計回りに見える方を北とするというだけのことだ。これは実生活で何気なく用いている"北"という言葉の語感と一致する。北極がある方が北なのだ(いや、北だから北極なんだろう?)。
そして、地球軌道面の北側より南側の方が地軸と太陽が離れているとき太陽は北側にあるし、逆ならば太陽は南側にある。つまり、上の図でどちらが春分でどちらが秋分なのかは、地軸の傾き方や軌道面の方向に依存するので、定めることができない。
これで終わるのは物足りないので、よくみる下のような図について説明を加えて終わりにしよう。
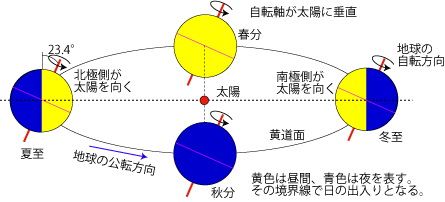
これは、国立天文台から借りたものだ。この図では地軸の傾きや軌道面の向き(自転方向)、公転方向が明示してあるので、春分の日と秋分の日の見分けがつく。図で見て変わるように、冬至の日には太陽は最も南にあり、春分を経て夏至の日になると最も北にある。そして、秋分を経て冬至に戻る。そして、春分の日こそ、太陽が"南から北"に移る日だ。
javascriptを使ったHTML要素の位置取得
javascriptから取得できるHTML要素の位置は様々な種類があるので、後から参照できるようにまとめておく。jqueryなどのライブラリを使う方法については省略。ネイティブ環境で使えるもののみ扱う。各見出しはMDN web docsへのリンクになっているので、詳細はそちらを参照。
- HTML要素の位置取得
- mouseイベント、touchイベントの位置取得
- viewport上の位置への変換
- 参考
HTML要素の位置取得
style.xxx
基本情報
cssのプロパティを取得、設定する。
getBoundingClientRect()
基本情報
| 相対要素 | margin | border | padding |
|---|---|---|---|
| viewport | x | o | o |
viewport相対なので、scrollによって変化する。
取得できる値
大体はgetClientRects()と同じだが、こちらで取得すると要素のボーダーを含む全体についての値が得られる。
- top
- left
- bottom
- left
- x
- y
- width
- height
getClientRects()
基本情報
| 相対要素 | margin | border | padding |
|---|---|---|---|
| viewport | x | o | o |
viewport相対なので、scrollによって変化する。
取得できる値
大体はgetBoundingClientRect()と同じだが、こちらで取得すると一行ずつの値がリストで得られる。一行ずつというのは、インライン要素が途中で折り返して複数行に渡って表示される場合、各行についての値を取得できるということ。ブロック要素の場合は、リストの要素は一つだけ。この要素は、getBoundingClientRect()で得られるものと同じ。
- [
- top -left
- bottom
- left
- x
- y
- width
- height
]
getClientRects()についての参考

<div> <strong>span's rect</strong> <p> <span>Paragraph that spans multiple lines</span> </p> </div>
上の画像において、span's rectにおいて赤色で示されているのが、spanの各行に関するgetClientRects()の戻り値。
[read-only] offsetTop
[read-only] offsetLeft
| 相対要素 | margin | border | padding |
|---|---|---|---|
| offsetParent | x | o | o |
取得できる値
offsetTopとoffsetLeftは、offsetParentに対する一行目の相対位置。すなわち、getClientRects()が返すリストの初めの要素をoffsetParentが基準となるように変換しても得られる。
offsetTop
- offsetTop
offsetLeft
- offsetLeft
[read-only] offsetWidth
[read-only] offsetHeight
| 相対要素 | margin | border | padding |
|---|---|---|---|
| offsetParent | x | o | o |
取得できる値
offsetWidth
- offsetWidth
offsetHeight
- offsetHeight
offsetxxxについての参考
[read-only] offsetParent
positionがrelative、absolute、fixedのいずれかである要素のうち直近の先祖。
取得できる値

<div> <span>Short span. </span> <span>Long span that wraps within this div.</span> </div>
この画像の中で赤色で示されているものが、二つ目のspanのoffsetxxxの値。top、left、width、heightに二つ目のspan要素のoffsetxxxで得られる値を設定している。
mouseイベント、touchイベントの位置取得
mouseイベントやtouchイベントでは、clickまたはtouchした場所を取得できる。その値と実際の場所の関係を書いておく。

上の図では、pointで示される場所にclickまたはtouchしたと想定している。
viewport上の位置への変換
何らかの基準に対する相対位置が得られたときに、それをviewport上への位置に変換する方法を書いておく。先ほど示したように、pageとviewportの関係は、window.pageX/YOffsetで得られる。これはすなわちbodyとviewportの関係なので、viewportに対する相対位置にwindow.pageX/YOffsetを加えることで、body上での位置が得られる。
具体的には、
var client_rec = document.getElementById(...).getBoundingClientRect(); var element_x = window.pageXOffset + client_rec.x; var element_x = window.pageYOffset + client_rec.y;
とすることで、elementの座標element_xとelement_yが得られる。
参考
page、screen、viewportとかの関係
スマホの場合 (iphone上のsafariとchromeで確認)

基本的には上の図のようになるが、viewportが画面に収まるようにブラウザが自動的に拡大・縮小することがある。
パソコンの場合 (mac上のsafariで確認)

外部ページ
Homogeneous(同次)座標系を使ったClipping
OpenGLライブラリの中には、glClipPlane(https://www.khronos.org/registry/OpenGL-Refpages/gl2.1/xhtml/glClipPlane.xml)という関数がある。この関数は平面を表すベクトル(というより、数の組)を受け取り、受け取った平面でクリッピングを行う。クリッピングの方法として、
If the dot product of ... a vertex with the stored plane equation components is positive or zero, the vertex is in with respect to that clipping plane. Otherwise, it is out.
と書かれているが、これで本当にクリッピングができるのか考えてみた。
前提
plane equation components
三次元空間内の二次元平面は、homogeneous座標系
cartesian座標系で(x, y, z)と表される点は、homogeneous座標系においては0でない任意数wを新たに導入して(wx, wy, wz, w)と表される。とくに、w=1のとき(普通はそうする)は(x, y, z, 1)となる。wは遠近法を考えるときに使えたりするのだけれど、省略。homogeneous座標系についての詳細はhttps://en.wikipedia.org/wiki/Homogeneous_coordinatesとかで読んでね。以降の説明では、homogeneous座標系の点(x, y, z, 1)とcartesian座標系の点(x, y, z)を同一視する。考えてみる
the dot product of a vertex with the stored plane equation componentsは、vertexの座標をDが0でないとき
plane equation components (A, B, C, D)で構成される平面より、cartesian座標が
となる。これは、平面

dotが正であるところがクリッピングされるのだったから、Dが正だとすると、この場合は平面に対して左側がクリッピングされることになる。
一方、plane equation components (-A, -B, -C, -D)で構成される平面もまた平面
である。この場合についても先ほどと同じように考えてみる。平面
上のあるvertexの座標が
だったとする。すると、
より、cartesian座標が
となり、先ほどの場合のdotの値(1-s)Dとは符号が反転している。この場合の模式図は、

となるので、Dが正だとすると、平面に対して右側がクリッピングされることになる。先ほどは左側がクリッピングされていたので、クリッピングの範囲が入れ替わっている。
Dが0でないときのまとめ
Dが0でないときには、Dの符号によってクリッピングされる範囲を瞬時に判断することができる。plane equation componentsが(A, B, C, D)であるとき、D>0ならば平面によって分けられた二つの空間のうち、原点を含む方がクリッピングされ、D<0ならば、原点を含まない方がクリッピングされる。このような仕組みで、単純に内積を取るだけでクリッピングができる。だが、D=0の場合には上の議論は破綻してしまう。模式図を見ても、D=0の時には全ての平面が一つになってしまうので、空間内の全てのvertexの内積について言及していないことが明らかにわかる。そこで、D=0のときは別に考えてみる。
Dが0のとき
plane equation componentsが(A, B, C, 0)であり、それが構成する平面をplane equation componentsが(A, B, C, 0)であり、それが構成する平面をとする。座標が
のvertexの内積
は、ベクトル(A, B, C)とベクトル
の内積に等しい。これより下図のように、ベクトル
が平面
に対してベクトル(A, B, C)と同じ方向にあるときはdotが正、逆方向にあるときはdotが負になる。

よってこの場合、平面の上側がクリッピングされる。
一方、plane equation componentsが(-A, -B, -C, 0)であるときも、それが構成する平面はと同じである。先ほどと同じように考えると、ベクトル
が平面
に対してベクトル(-A, -B, -C)と同じ方向にあるときはdotが正、逆方向にあるときはdotが負になる。

よってこの場合には、平面の下側がクリッピングされる。
Dが0のときのまとめ
D=0のとき、plane equation componentsが(A, B, C, 0)ならば、平面によって分けられた二つの空間のうち、位置ベクトル(A, B, C)によって表される点を含む方が(ie. ベクトル(A, B, C)がさす方の空間が)クリッピングされる。 位置ベクトル(A, B, C)によって表される点は先ほど言ったように、平面に含まれることはないので、クリッピングする空間は必ず定まる。まとめ
homogeneous座標系は平行移動が行列の掛け算で表せるなどの利点がよく引き合いに出されるが、このようにクリッピングを行ううえでも便利だ。また、記事の中でも少し触れたけど、遠近法に関する計算も楽にできる。例えば、vertexを遠近法を考慮して平面に投影させることを考える。まず、視点(カメラの位置)が原点、投影面がz=1となるようにcartesian座標をとる。各vertexのhomogeneous座標をcartesian座標から、(x, y, z) -> (x, y, z, z)となるように定める。そののち、各vertexのhomogeneous座標を第四成分が1となるように規格化(各成分を第四成分で割る)する。規格化後の座標が(x', y', 1, 1)なら、投影後の座標は(x', y')だ。このように、遠近法に関する計算を楽に行える。だから、homogeneous座標系はグラフィックス分野で多用されるらしい(本当はこの分野に来てまだ3日なので何もわかってない)。デバッグ情報を探る 〜.cfi_xx命令の動作〜
次のようなc言語プログラムを例にとって考えていく。
// test.c int hoge(int x) { return x+1; } int main() { int a = 1; return hoge(a); }
gcc -O0 -S test.cを実行してコンパイルすると、
; test.s _hoge: .cfi_startproc pushq %rbp .cfi_def_cfa_offset 16 .cfi_offset %rbp, -16 movq %rsp, %rbp .cfi_def_cfa_register %rbp movl %edi, -4(%rbp) movl -4(%rbp), %edi addl $1, %edi movl %edi, %eax popq %rbp retq .cfi_endproc _main: .cfi_startproc pushq %rbp .cfi_def_cfa_offset 16 .cfi_offset %rbp, -16 movq %rsp, %rbp .cfi_def_cfa_register %rbp subq $16, %rsp movl $0, -4(%rbp) movl $1, -8(%rbp) movl $1, -12(%rbp) movl -8(%rbp), %eax addl -12(%rbp), %eax movl %eax, %edi callq _hoge addq $16, %rsp popq %rbp retq .cfi_endproc
このようなアセンブリが生成される。
.cfi_startproc擬似命令では、CFI (Call Frame Infomation)が新たに追加され、CFA (Canonical Frame Address)計算用のレジスタがrspに、オフセットが0に初期化される。続くpushqではrbpをスタックに退避させている。そして、.cfi_def_cfa_offsetでCFAのオフセットを16にしている。このときのスタックには、

のようにデータが格納されていく。
.cfi_offset %rbp, -16では、rbpレジスタの値をCFA-16のアドレスに退避させたことを表している。実際、rbpレジスタの値はスタックの先頭にあるので、(rsp-16)+16 = rspはrbpレジスタの値が格納されているアドレスを表す。僕はここで少しハマったのだが、rbpの値が格納されているアドレスはrsp-8ではない。スタックは成長するにつれてアドレスが減るからだ。(下図参照)

実際例えば、
mv (%rsp-16+16) %rx
とすることで、rxレジスタにrbpの元の値を格納できる。
その後、CFAのレジスタを.cfi_def_cfa_register %rbpとすることで、このフレームのCFAを固定している。rspを参照レジスタにすると、スタック操作をするたびにCFAが変わってしまう。
最後に、.cfi_endprocで前のフレームのCFAを復元している。これらの命令によって生成された情報は、デフォルトでは.eh_frameセクションに保存される。
レジスタ制御用ワンライナー達
変数regにマップされたレジスタを、ビット演算子で制御する。
マスクを用意
msk = 1U << x;
AND (&)
xビットを取ってくる
bit = (reg & msk) >> x;
xビットをクリア
reg &= ~msk;
xビット以外をクリア
reg &= msk;
xビットによる条件分岐 (1bit)
if (reg & msk) // ビットが立っていれば、、、 ; else ;
xビットによる条件分岐 (マルチbit)
if ((reg & msk) == msk) // ビットが立っていれば、、、 ; else ;
OR (|)
xビットを立てる
reg |= msk;
XOR (^)
xビットをトグル
reg ^= msk;
番外編
下位xビットをとってくる
reg & (msk - 1U)
マクロ内で変数を安全に使う方法
#define HOGE() do { \ int new_var; \ ... \ } while(0);
STM32F3探訪〜GPIOx_ODR vs GPIOx_BSRR 〜
STM32F3のGPIOピンのoutput用レジスタには、GPIOx_ODRというものと、GPIOx_BSRRという二種類ある。その違いを調べたので、書き留めておく。
ODRとBSRRは共に書き込み可能なレジスタであり、GPIOのoutput値を決めるのに使える。BSRRはリファレンスに、
Bits 31:16 BRy: Port x reset bit y (y = 0..15)
These bits are write-only. A read to these bits returns the value 0x0000.
0: No action on the corresponding ODRx bit
1: Resets the corresponding ODRx bit
Note: If both BSx and BRx are set, BSx has priority.
Bits 15:0 BSy: Port x set bit y (y= 0..15)
These bits are write-only. A read to these bits returns the value 0x0000.
0: No action on the corresponding ODRxODR
1: Sets the corresponding ODRx bit
と書いてあるように、ODRを設定するためのレジスタである。では、ODRだけでいいじゃないかと思うかもしれないが、次のような場合の為に、BSRRが必要だ。
例
Port xのbit yピンを1にしたいときを考える。
ODRだけ
uint32_t odr = GPIOx->ODR; # part 1 odr |= 1UL << y; # part 2 GPIOx->ODR = odr; # part 3
といった操作を行うことになる。しかし、part 1のあとに割り込みが入り、割り込みルーチンの中でODRが変更されたときを考えてほしい。part 3で書き戻したときに、その変更をなかったことにしてしまう。
ODRとBSRR
uint32_t bsrr = 1UL << y; # part 1 GPIOx->BSRR = bsrr; # part 2
という操作で実現できる。BSRRに0を書き込んでも何も起こらないからこのようにできる。この場合、part 1の後に割り込みが入っても、ODRのコピーをしていないので問題ない。また、命令数が単純に少なくなっているので実行が早くなる。
BSRRのこのような性質を指して、レファレンスではatomicという語を使っている。ただ、何の前置きもなしにatomicと言われても何のことかわからないので、例解してみた。
追記
ODRだけの時のコードは、
GPIOx->ODR |= 1UL << y;
と一行で書ける。しかし、この場合も生成されるバイナリ(ここでは擬似的なアセンブリで示す)は、
mv GPIOx->ODR, %r0 or 1UL << y, %r0 mv %r0, GPIO->ODR
といった感じになるので、一命令ではない。